MAVLink Versions
MAVLink is deployed in two major versions: MAVLink 1.0 and MAVLink 2.0.
MAVLink v1.0 was widely adopted around 2013. MAVLink 2.0 was adopted by major users early 2017, but there are still quite a few legacy peripherals in use that don't yet support it. The MAVLink 2.0 C/C++ and Python libraries are backwards compatible with MAVLink 1.0, which has tremendously simplified the transition.
Version Handshaking
Support for MAVLink 2 is indicated in the AUTOPILOT_VERSION message by the MAV_PROTOCOL_CAPABILITY_MAVLINK2 flag. This is sufficient if the communication link between autopilot and GCS is completely transparent. However, most communication links are not completely transparent as they either include routing or in case of fixed-length wireless implementations on packetization. In order to also test the link, the MAVLink 2 handshake protocol sends a MAVLink 2 frame to test the complete communication chain.
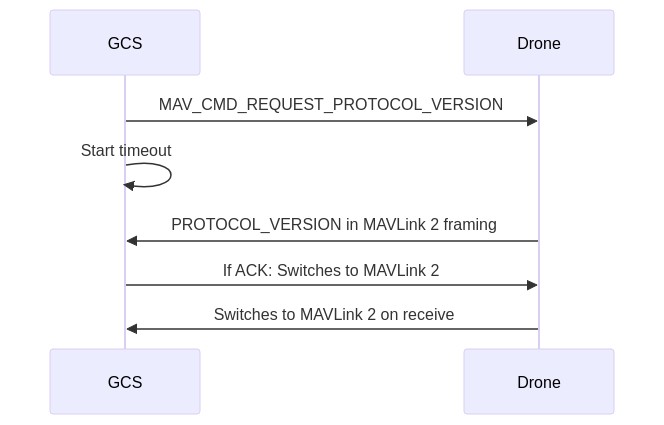
To do so, the GCS sends a COMMAND_LONG or COMMAND_INT message with the command ID MAV_CMD_REQUEST_PROTOCOL_VERSION.
If the system supports MAVLink 2 and the handshake it will respond with PROTOCOL_VERSION encoded as MAVLink 2 packet. If it does not support MAVLink 2 it should NACK the command. The GCS should fall back to a timeout in case the command interface is not implemented properly. The diagram below illustrates the complete sequence.
Semi-Transparent Legacy Radios
Some popular legacy radios (e.g. the SiK radio series) operate in semi-transparent mode by injecting RADIO_STATUS messages into the MAVLink message stream. Per MAVLink spec these should actually emit a heartbeat with the same system ID and a different component ID than the autopilot to be discoverable. However, an additional heartbeat could be an issue for deployed systems. Therefore these radios can alternatively confirm their MAVLink 2 compliance by emitting RADIO_STATUS in v2 message format after receiving the first MAVLink v2 frame.
Semi-transparent Legacy Radios
Some popular legacy radios (e.g. the SiK radio series) operate in semi-transparent mode by injecting RADIO_STATUS messages into the MAVLink message stream. Per MAVLink spec these should actually emit a heartbeat with the same system ID and a different component ID than the autopilot to be discoverable. However, an additional heartbeat could be an issue for deployed systems. Therefore these radios can alternatively confirm their MAVLink 2 compliance by emitting RADIO_STATUS in v2 message format after receiving the first v2 MAVLink frame.
Negotiating Versions
Vehicle and GCS implementations will support both MAVLink 1 and MAVLink 2 for quite some time. We would like most users to receive the benefit of MAVLink 2, while still supporting implementations that don't yet support MAVLink 2.
The following is meant to capture best practice for vehicle firmware and GCS authors:
Vehicle implementations should have a way to enable/disable the sending of MAVLink 2 messages. This should preferably be on a per-link basis to allow for some peripherals to be MAVLink 1 while others are MAVLink 2. It is acceptable for this option to require a reboot of the flight controller to take effect.
If signing is enabled and MAVLink 2 is enabled then the vehicle should immediately start sending MAVLink 2 on startup.
If signing is not enabled and MAVLink 2 is enabled then the vehicle may choose to start by sending MAVLink 1 and switch to MAVLink 2 on a link when it first receives a MAVLink 2 message on the link.
Vehicles should set the
MAV_PROTOCOL_CAPABILITY_MAVLINK2capability flag in theAUTOPILOT_VERSIONmessage if MAVLink 2 is available on a link. This should be set in the case where the link is currently sending MAVLink 1 packets but MAVLink 2 packets will be accepted and will cause a switch to MAVLink 2.GCS implementations can choose to either automatically switch to MAVLink 2 where available or to have a configuration option for MAVLink 2.
If the GCS chooses to use a configuration option then when the option is enabled it should send MAVLink 2 on starting the link.
If the GCS chooses to use automatic switching then it should switch to sending MAVLink 2 if either it receives a MAVLink 2 message on the link or by asking for the
AUTOPILOT_VERSIONmessage to be sent and seeing theMAV_PROTOCOL_CAPABILITY_MAVLINK2flag is set.