Command Protocol
The MAVLink command protocol allows guaranteed delivery of MAVLink commands.
Commands are values of MAV_CMD that define the values of up to 7 parameters. These parameters and the command id are encoded in COMMAND_INT or COMMAND_LONG for sending.
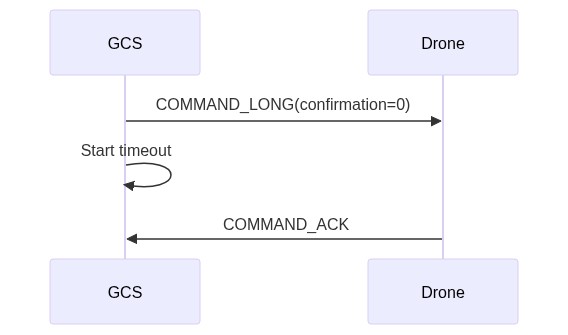
The protocol provides reliable delivery by expecting a matching acknowledgement (COMMAND_ACK) from commands to indicate command arrival, and result. If not acknowledgement is received the command must be automatically re-sent.
COMMAND_INTis generally recommended when sending positional information as it allows greater precision, and is explicit about the co-ordinate frame. Commands that require float-only properties in parameters 5, 6 must be sent inCOMMAND_LONG(e.g. commands where NaN has an explicit meaning).
Message/Enum Summary
| Message | Description |
|---|---|
| COMMAND_INT | Message for encoding a command (MAV_CMD). The message encodes commands into up to 7 parameters: parameters 1-4, 7 are floats, and parameters 5,6 are scaled integers. The scaled integers are used for positional information (scaling depends on the actual command value). The coordinate frame of positional parameters is explicitly specified in a frame field. Commands that require float-only properties in parameters 5, 6 cannot be sent in this message (e.g. commands where NaN has an explicit meaning). |
| COMMAND_LONG | Message for encoding a command (MAV_CMD). The mesage encodes commands into up to 7 float parameters. The coordinate frame used for positional co-ordinates is implementation dependent. Any command may be packaged in this message, but there may be some loss of precision for positional co-ordinates (latitude, longitude). |
| COMMAND_ACK | Command acknowledgement. Includes result (success, failure, still in progress) and may include progress information and additional detail about failure reasons. |
| Enum | Description |
|---|---|
| MAV_CMD | Commands to be executed/sent in the command messages. |
| MAV_FRAME | Coordinate frame. Used COMMAND_INT to specify co-ordinate frame of an positional parameters. |
| MAV_RESULT | Result of command, included in COMMAND_ACK.result. |
Sequences
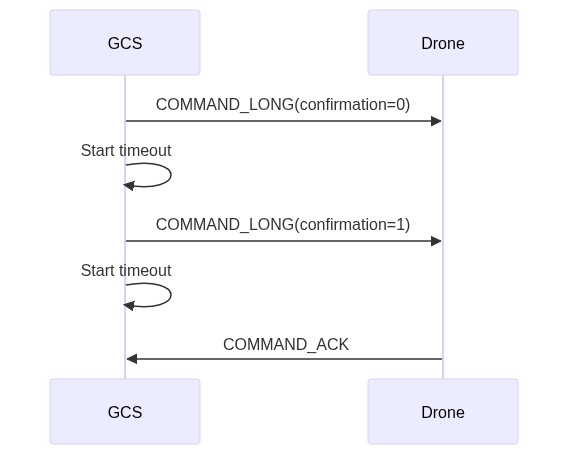
If the command drops the sender should increase the confirmation field:
The command may not complete immediately, in which case the drone can report its progress by sending COMMMAND_ACK messages with COMMAND_ACK.result=MAV_RESULT_IN_PROGRESS and the progress as a percentage in COMMMAND_ACK.progress ([0-100] percent complete, 255 if progress not supplied). When the operation completes, the drone must terminate with a COMMMAND_ACK containing the final result of the operation (e.g. failed, accepted, etc.).
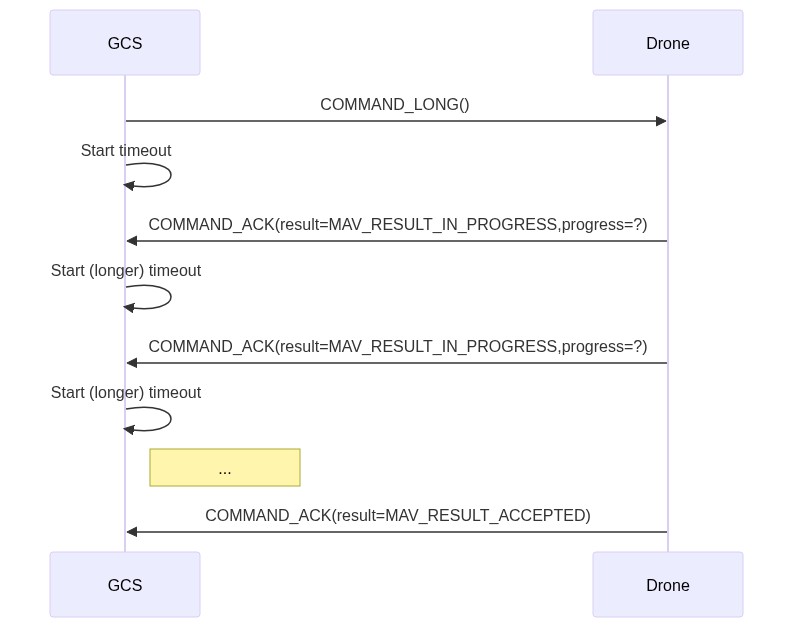
The rate at which progress messages are emitted is system-dependent. Generally though, the GCS should have a much increased timeout after receiving an ACK with MAV_RESULT_IN_PROGRESS.