Arm Authorization
When enabled by setting a parameter on the flight stack, the drone will only arm the motors if authorized by a external entity. This external entity is responsible for requesting any information that it needs from the drone and from other sources (example: weather) and whether (or not) to authorize the arming procedure.
This is required to comply with NASA UTM, but may also be useful for private companies.
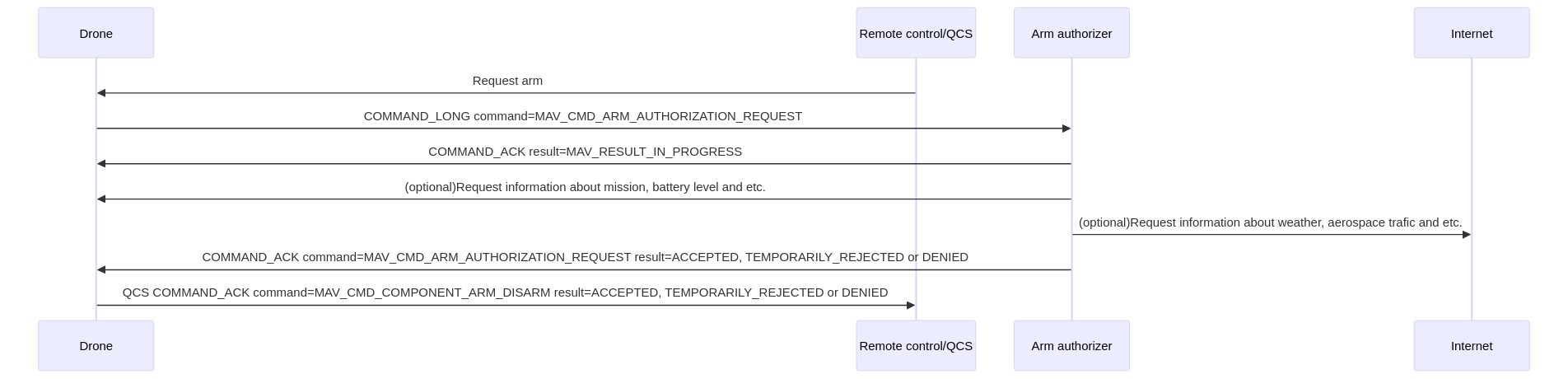
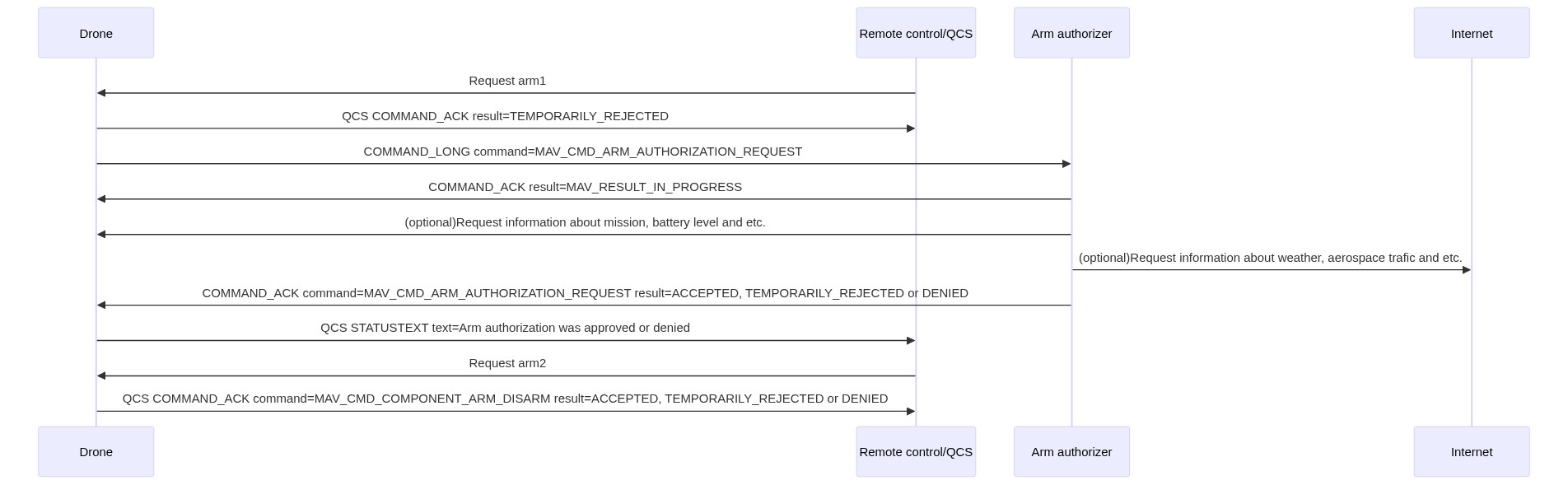
Authorization Flow
In case the authorizer needs a lot of time to get and process the information is better have another authorization flow to avoid arm the drone at unexpected time.
Message Parameters
COMMAND_LONG
command=MAV_CMD_ARM_AUTHORIZATION_REQUEST
target_system=system id of arm authorizer
target_component=component id of arm authorizerCOMMAND_ACK
command=MAV_CMD_ARM_AUTHORIZATION_REQUEST
result=ACCEPTED, TEMPORARILY_REJECTED or DENIED
progress/result_param1=if result is TEMPORARILY_REJECTED or DENIED the reason should be set MAV_ARM_AUTH_DENIED_REASON otherwise it should be set as 0
result_param2=if result is ACCEPTED the it should be set with the time in seconds that this authorization is valid otherwise an additional information about why it was denied should be set. example: for result_param1=MAV_ARM_AUTH_DENIED_REASON_INVALID_WAYPOINT or MAV_ARM_AUTH_DENIED_REASON_AIRSPACE_IN_USE it may have the index of the waypoint that caused it to be denied.
target_system=system id of the drone
target_component=component id of the drone